









激光雷达在车路协同的「使命」是什么?
二、为什么是激光雷达
摄像头的缺陷主要来自于光线,在光线较差或强光干扰下,误判率高。同时,摄像头的探测距离受到光线影响会变短,精度变低等。采用单一摄像头在路端计算需要极强的算力,并且信号传输和处理会有带宽和实时性的影响。
毫米波的缺陷主要在于对完全静止的物体几乎没有什么回波,而处于某些金属干扰的环境下,容易产生误报。激光雷达本身对环境光不依赖,24h全天时工作,因此大大增强了感知的适应性。并且对目标物的三维探测能力增强了准确性,无论是静态或动态物体,均可捕捉。
路端的场景十分复杂,以在流量较大的十字路口为典型。事实上,仅仅依靠一种技术手段,误报、漏报都将成为安全隐患,无法对路况信息实现稳定的智能检测。如果将激光雷达与摄像头融合,一次性获得物体的位置、距离、尺寸、速度、方向、颜色等信息。
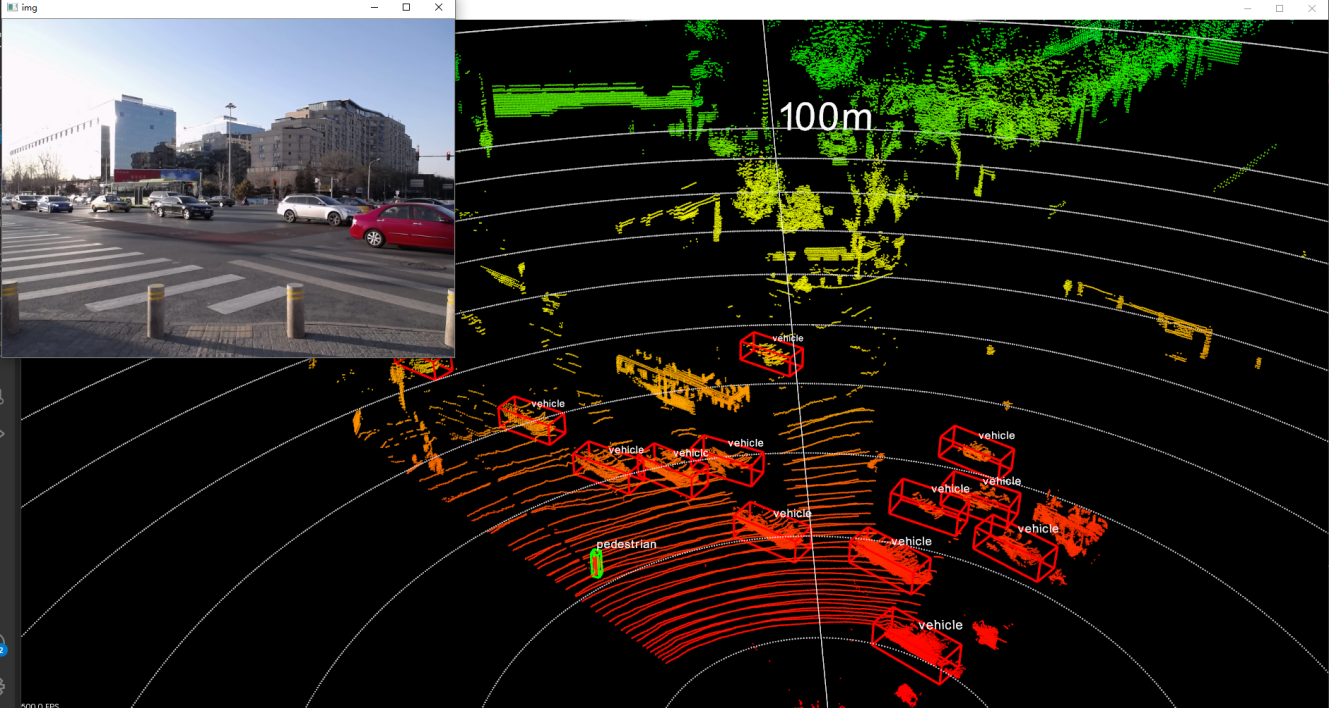
图4 北醒Horn系列激光雷达识别十字路口车辆及行人
1.极强的数据采集能力
探测距离远
机械旋转雷达一般有效测距为150到200米,采用1550nm人眼安全的北醒Horn系列激光雷达,探测距离可以达到300米,300米意味着在路端布线时,可以减少硬件成本,降低施工压力。
分辨率高
市场上常见的激光雷达以16线、32线、64线为主,线束对应的参数是分辨率。图像级激光雷达还是数字激光雷达,都是将线束做到非常高,从而后期算法要求降低了难度,降低感知层面的难度。北醒和一些激光雷达厂商为了解决远距离小目标物探测能力,已经将分辨率做到了300-600线。针对车路协同应用,路面目标物种类多、数量多的特点,分辨率越高越能快速识别出来。
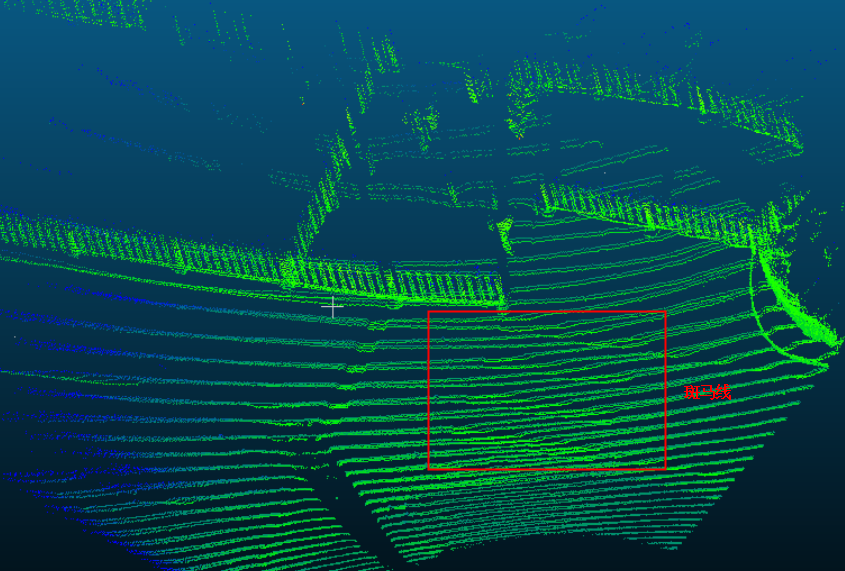
图5 北醒Horn系列激光雷达探测的斑马线
小目标物由于体积很小,因此激光雷达发射出去的光很难被接收回来。分辨率的高低主要由垂直角分辨率决定。垂直角分辨率的数值越小,代表则能探测到目标物的点越多,探测的清晰度越高,对于小目标物的点获取越多。如下图所示,垂直方向的间隔小,点云数量多。

图6 同等距离下,垂直分辨率0.05°和0.1°的行人点云对比示意图
在垂直方向角分辨率上,北醒激光雷达的垂直角分辨率可精确到0.05°,是64线激光雷达的9.4倍,可以对远距离小目标物精准探测,对行人实际可探测与识别能力达到115米,而64线激光雷达线束过低,实际可探测与识别能力仅为12米以内。

表2 激光雷达等同线数与可识别小物体(0.1m)的最远距离关系
视场角广
路口安装的摄像头的覆盖区域一般只有10°左右,视野范围较窄。360°机械旋转雷达无疑拥有更多的视野,但是内部旋转结构让其使用寿命一直存疑。北醒Horn系列激光雷达不采取机械同轴旋转结构,具有横向90°的视场角度,探测范围远远大于摄像头,单台可以覆盖300m*300m的大场景。因此,检测相同路口,安装激光雷达的数量将远少于摄像头的数量。激光雷达方案比单一摄像头方案更利于检测大视野的闯红灯区域。

 分享
分享








最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
4月30日立即下载>> 【村田汽车】汽车E/E架构革新中,新智能座舱挑战的解决方案
-
5月15-17日立即预约>> 【线下巡回】2025年STM32峰会
-
即日-5.15立即报名>>> 【在线会议】安森美Hyperlux™ ID系列引领iToF技术革新
-
5月15日立即下载>> 【白皮书】精确和高效地表征3000V/20A功率器件应用指南
-
5月16日立即参评 >> 【评选启动】维科杯·OFweek 2025(第十届)人工智能行业年度评选







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论