









关于图像处理和Python深度学习的教程:第一部分
介绍
在这篇文章中,我们将学习如何执行图像处理。在整篇文章中,我们使用到的库是Scikit Image。
基础知识
1、什么是图像?
图像数据可能是文本之后最常见的数据。那么,电脑如何理解你在埃菲尔铁塔前的自拍呢?
它使用一个称为像素的小正方形网格。像素覆盖一个小区域,并具有表示颜色的值。图像中的像素越多,其质量越高,存储所需的内存越多。
就是这样。图像处理主要是处理这些单独的像素(有时是像素组),以便计算机视觉算法可以从中提取更多信息。
2、NumPy和Skimage的图像基础
在Matplotlib和Skimage中,图像都作为NumPy ndarray加载。
from skimage.io import imread # pip install scikit-image
image = imread("images/colorful_scenery.jpg")
>>> type(image)
numpy.ndarray
NumPy数组带来灵活性、速度和力量。图像处理也不例外。
Ndarrays可以轻松检索图像的一般详细信息,例如图像的尺寸:
>>> image.shape
(853, 1280, 3)
>>> image.ndim
3
# The number of pixels
>>> image.size # 853 * 1280 * 3
3275520
我们的图像高度为853像素,宽度为1280像素。第三维表示RGB(红、绿、蓝)颜色通道的值。最常见的图像格式是3D。
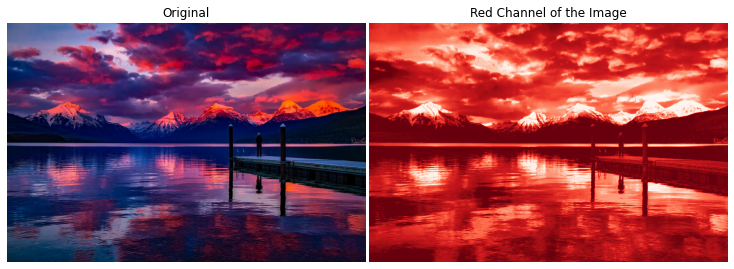
你可以通过常规NumPy索引检索单个像素值。下面,我们尝试索引图像以检索三个颜色通道中的每一个通道:
red = image[:, :, 0]
compare(image, red, "Red Channel of the Image", cmap_type="Reds_r")
green = image[:, :, 1]
compare(image, green, "Green Channel of the Image", "Greens_r")

blue = image[:, :, 2]
compare(image, blue, "Blue Channel of the Image", "Blues_r")

0表示红色,1表示绿色,2表示蓝色通道-非常简单。
创建了两个函数,show和compare,它们显示一个图像或并排显示其中两个进行比较。在整个教程中,我们将广泛使用这两个函数。
按照约定,ndarray的第三维用于颜色通道,但并不总是遵循此约定。Skimage通常提供参数来指定这种行为。
图像与通常的Matplotlib绘图不同。它们的原点不位于左下角,而是位于左上角的位置(0,0)。
>>> show(image, axis=True)

当我们在Matplotlib中绘制图像时,轴表示像素的顺序,但我们通常会隐藏它们。
3、常见转换
我们将要执行的最常见的图像转换是将彩色图像转换为灰度。许多图像处理算法需要灰度图像。因为颜色不是图片的定义特征,没有它,计算机仍然可以提取足够的信息。
from skimage.color import rgb2gray
image = imread("images/grayscale_example.jpg")
# Convert image to grayscale
gray = rgb2gray(image)
compare(image, gray, "Grayscale Image")

>>> gray.shape
(853, 1280)
当将图像转换为灰度时,它们会丢失其第三维度-颜色通道。相反,图像数组中的每个单元格现在表示uint8类型的整数。它们的范围从0到255,提供256种灰度。
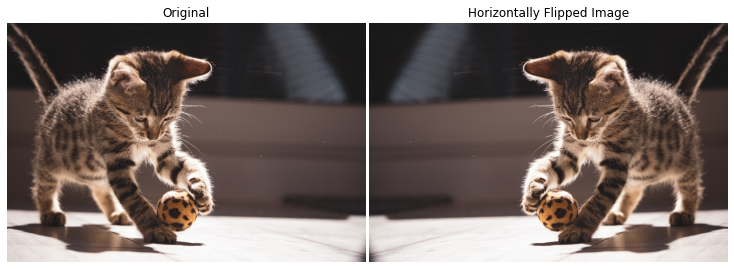
你还可以使用np.flipud或者np.fliplr之类的NumPy函数,随心所欲地以任何方式操纵图像。
kitten = imread("images/horizontal_flip.jpg")
horizontal_flipped = np.fliplr(kitten)
compare(kitten, horizontal_flipped, "Horizontally Flipped Image")
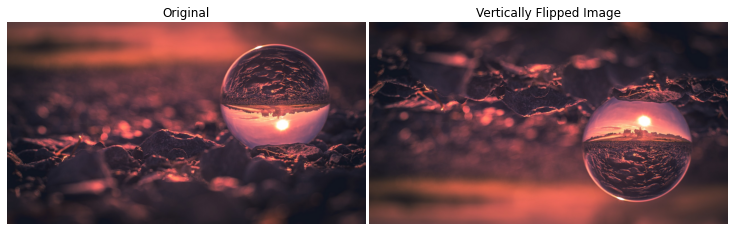
ball = imread("images/upside_down.jpg")
vertically_flipped = np.flipud(ball)
compare(ball, vertically_flipped, "Vertically Flipped Image")
在“颜色”模块中,你可以找到许多其他变换函数来处理图像中的颜色。
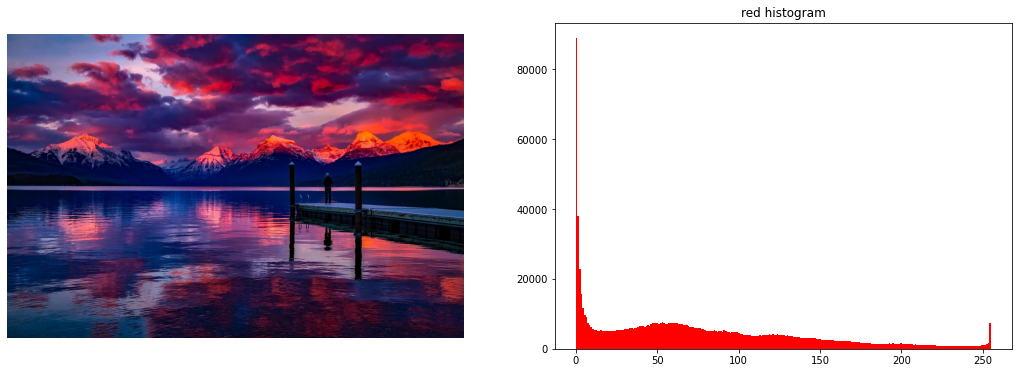
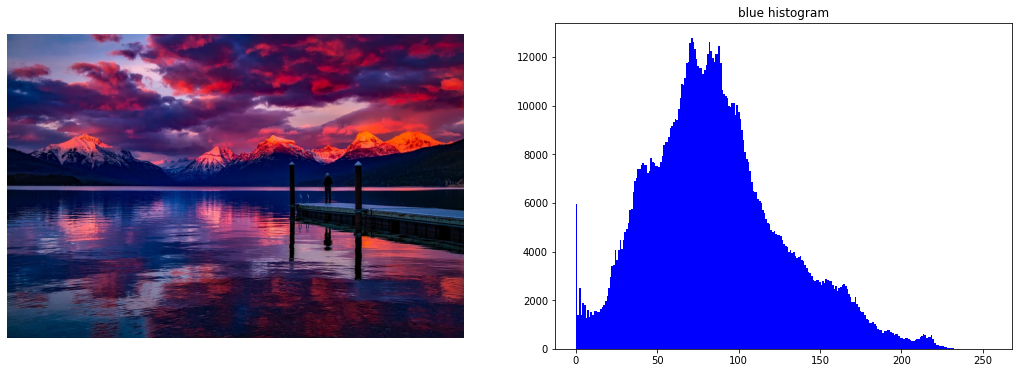
4、颜色通道直方图
有时,查看每个颜色通道的强度有助于了解颜色分布。我们可以通过切片每个颜色通道并绘制它们的直方图来实现这一点。以下是执行此操作的函数:
def plot_with_hist_channel(image, channel):
channels = ["red", "green", "blue"]
channel_idx = channels.index(channel)
color = channels[channel_idx]
extracted_channel = image[:, :, channel_idx]
fig, (ax1, ax2) = plt.subplots(
ncols=2, figsize=(18, 6)
)
ax1.imshow(image)
ax1.axis("off")
ax2.hist(extracted_channel.ravel(), bins=256, color=color)
ax2.set_title(f"{channels[channel_idx]} histogram")
除了Matplotlib的一些细节之外,你还应该注意hist函数的调用。提取颜色通道及其数组后,我们将其展平为1D数组,并将其传递给hist函数。
bin数量应该是256个,每个像素值对应一个-0表示黑色,255表示完全白色。
让我们使用彩色风景图像:
colorful_scenery = imread("images/colorful_scenery.jpg")
plot_with_hist_channel(colorful_scenery, "red")
>>> plot_with_hist_channel(colorful_scenery, "green")

>>> plot_with_hist_channel(colorful_scenery, "blue")
还可以使用直方图在将图像转换为灰度后找出图像中的亮度:
gray_color_scenery = rgb2gray(colorful_scenery)
plt.hist(gray_color_scenery.ravel(), bins=256);
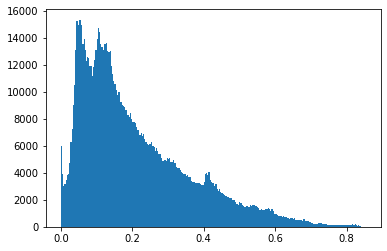
大多数像素的值较低,因为景物图像较暗。
我们将在以下部分探讨直方图的更多应用。
过滤器
1、手动阈值
现在,我们来看看有趣的东西——过滤图像。我们将学习的第一个操作是阈值化。让我们加载一个示例图像:
stag = imread("images/binary_example.jpg")
>>> show(stag)

阈值分割在图像分割、目标检测、边缘或轮廓提取等方面有着广泛的应用,它主要用于区分图像的背景和前景。
阈值处理在高对比度灰度图像上效果最好:
# Convert to graysacle
stag_gray = rgb2gray(stag)
>>> show(stag_gray)

我们将从基本的手动阈值设置开始,然后转到自动阈值设置。
首先,我们查看灰度图像中所有像素的平均值:
>>> stag_gray.mean()
0.20056262759859955
请注意,通过将所有灰度图像的值除以256,上述灰度图像的像素在0和1之间归一化。
我们得到的平均值为0.2,这为我们提供了可能要使用的阈值的初步想法。
现在,我们使用这个阈值来进行掩码操作。如果像素值低于阈值,否则其值将变为0-黑色或1-白色。换句话说,我们得到一个黑白二值图像:
# Set threshold
threshold = 0.35
# Binarize
binary_image = stag_gray > threshold
compare(stag, binary_image, "Binary image")

在这个版本中,我们可以更清楚地区分鹿的轮廓。我们可以反转遮罩,使背景变为白色:
inverted_binary = stag_gray <= threshold
>>> compare(stag, inverted_binary, "Binary image inverted")

2、阈值-全局
虽然尝试不同的阈值并观察它们对图像的影响可能很有趣,但我们通常使用比我们的眼球估计更稳健的算法来执行阈值分割。
有很多阈值算法,所以可能很难选择一种。在这种情况下,skimage具有try_all_threshold函数,该函数在给定的灰度图像上运行七种阈值算法。让我们加载一个示例并进行转换:
flower = imread("images/global_threshold_ex.jpg")
flower_gray = rgb2gray(flower)
compare(flower, flower_gray)

我们将看看是否可以使用阈值优化郁金香的特征:
from skimage.filters import try_all_threshold
fig, ax = try_all_threshold(
flower_gray, figsize=(10, 8), verbose=False
)
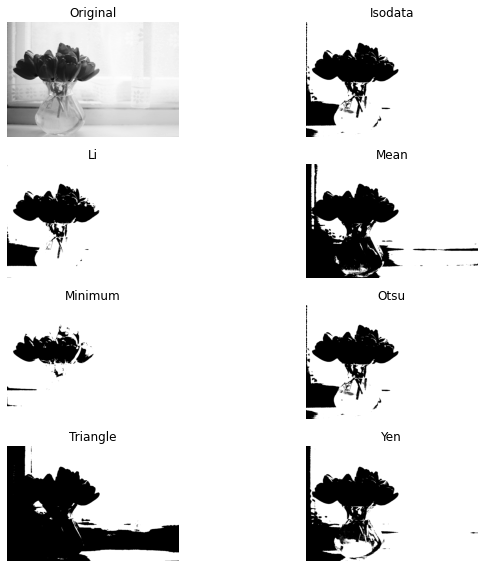
正如你所看到的,一些算法在这张图像上工作得更好,而其他算法则很糟糕。otsu算法看起来更好,所以我们将继续使用它。
在这一点上,我想提请你注意郁金香的原始图像:
>>> show(flower)

图像背景不均匀,因为有太多光线从后面的窗口射进来。我们可以通过绘制灰色郁金香的直方图来证实这一点:
>>> plt.hist(flower_gray.ravel(), bins=256);

正如预期的那样,大多数像素的值都位于直方图的远端,这证实了它们大部分都是明亮的。
为什么这很重要?根据图像的亮度,阈值算法的性能也会发生变化。因此,阈值算法通常有两种类型:
全局-适用于具有均匀、统一背景的照片
局部-用于不同图片区域中具有不同亮度级别的图像。
郁金香图像属于第二类,因为右侧部分比另一半亮得多,使其背景不均匀。我们不能在其上使用全局阈值算法,这就是为什么try_all_threshold中所有算法的性能都很差的原因。
稍后我们将回到郁金香示例和局部阈值。现在,我们将加载另一个亮度更精确的实例,并尝试自动设置阈值:
spiral = imread("images/otsu_example.jpg")
spiral_gray = rgb2gray(spiral)
compare(spiral, spiral_gray)

我们将在Skimage中使用通用的全局阈值算法threshold_otsu:
from skimage.filters import threshold_otsu
# Find optimal threshold with `threshold_otsu`
threshold = threshold_otsu(spiral_gray)
# Binarize
binary_spiral = spiral_gray > threshold
compare(spiral, binary_spiral, "Binarized Image w. Otsu Thresholding")
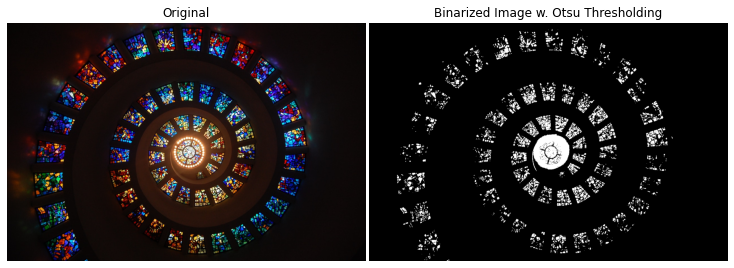
它工作得更好!
3、阈值-局部
现在,我们将使用局部阈值算法。
局部算法不关注整个图像,而是关注像素邻域,以解释不同区域的亮度不均匀。skimage中常见的局部算法为threshold_local函数:
from skimage.filters import threshold_local
local_thresh = threshold_local(flower_gray, block_size=3, offset=0.0002)
binary_flower = flower_gray > local_thresh
compare(flower, binary_flower, "Tresholded flower image")

你必须使用offset参数来找到符合你需要的最佳图像。offset是从局部像素邻域的平均值中减去的常数。该“像素邻域”由local_threshold中的block_size参数确定,该参数表示算法在每个方向上围绕每个点查看的像素数。
显然,同时调整offset和block_size是一个缺点,但局部阈值是唯一比手动或全局阈值产生更好结果的选项。
让我们再举一个例子:
from skimage.filters import threshold_local
handwriting = imread("images/chalk_writing.jpg")
handwriting_gray = rgb2gray(handwriting)
# Find optimal threshold using local
local_thresh = threshold_local(handwriting_gray, offset=0.0003)
# Binarize
binary_handwriting = handwriting_gray > local_thresh
compare(handwriting, binary_handwriting,
"Binarized image with local thresholding")
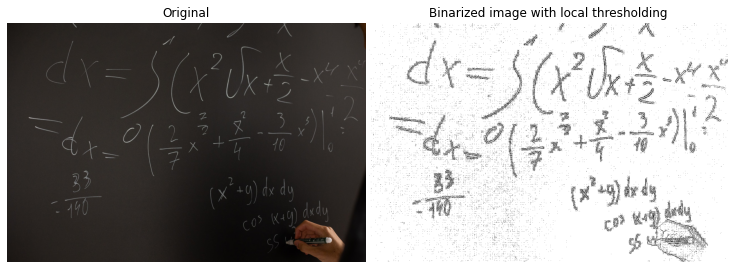
正如你所看到的,经过阈值处理后,黑板上的笔迹更加精细。
4、边缘检测
边缘检测在很多方面都很有用,例如识别对象、从中提取特征、对其进行计数等等。
我们将从基本的Sobel滤波器开始,它在灰度图像中查找对象的边缘。我们将加载一张硬币图片,并对其使用Sobel滤波器:
from skimage.filters import sobel
coins = imread("images/coins_2.jpg")
coins_gray = rgb2gray(coins)
coins_edge = sobel(coins_gray)
compare(coins, coins_edge, "Images of coins with edges detected")

sobel很直截了当;你只需在灰色图像上调用它即可获得如上所述的输出。我们将在后面的部分中看到Sobel的更复杂版本。
5、平滑
另一种图像过滤技术是平滑。许多像下面的鸡一样的图像可能包含随机噪声,而对ML和DL算法没有任何有价值的信息。
例如,鸡周围的毛发会给图像添加噪声,这可能会使ML模型的注意力偏离主要对象本身。在这种情况下,我们使用平滑来模糊噪声或边缘并降低对比度。
chickens = imread("images/chickens.jpg")
>>> show(chickens)

高斯平滑是最流行和最强大的平滑技术之一:
from skimage.filters import gaussian
smoothed = gaussian(chickens, multichannel=True, sigma=2)
compare(chickens, smoothed, "An image smoothed with Gaussian smoothing")

你可以通过调整sigma参数来控制模糊的效果。如果你正在处理RGB图像,请不要忘记将multichannel设置为True。
如果图像分辨率太高,平滑效果可能肉眼看不到,但仍然有效。
原文标题 : 关于图像处理和Python深度学习的教程:第一部分

 分享
分享









先进LED照明系统,引领未来趋势新标杆")





发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论