






自动驾驶安全框架开发进展综述

美国AV 3.0提出的12项安全要素
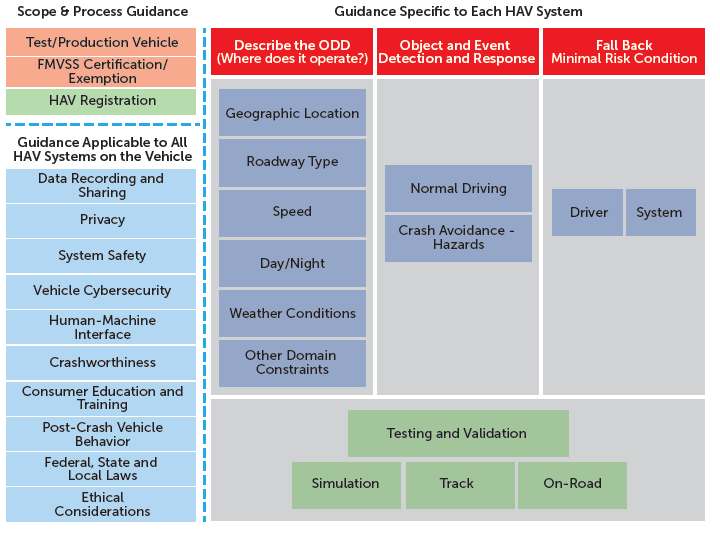
美国AV 3.0中提出了自动驾驶车辆开发、开放道路测试、应用相关最主要的安全要素,包括:系统安全、ODD(Operational Design Domain)、OEDR功能、Fallback(Minimal Risk Condition)、网络安全、数据记录、碰撞安全性(成员保护)、碰撞后处置(Post Crash)、自动驾驶车辆行为、验证与测试、人机界面(HMI)、用户教育与培训、联邦和当地法规。
车辆性能指南框架/Framework for Vehicle Performance Guidance

UL 4600《自动驾驶产品安全评估标准》
2020年4月,非营利标准组织Underwriters Laboratories(简称UL)宣布UL 4600《自动驾驶产品安全评估标准》正式发布,这是UL针对无人驾驶车辆而开发的首个安全评估标准,属于自愿性行业标准草案。
与ISO 26262和21448一样,UL 4600是一个以过程为中心的标准,旨在供制造商在开发AV时使用。
标准范围包括评估自动驾驶产品的安全原则与流程。此标准基于设计流程、测试、工具资格、自主性验证、数据完整性以及针对非驾驶员的人机交互等因素,涵盖相应风险分析与安全相关方面等若干主题,并要求提供安全论证。
标准规定采用安全案例方法来确保ADS的安全性。已发布的安全案例方法包括三个主要要素:目标、论证和证据;每个要素都说明支持前一要素,以构建总体安全案例。

ISO 2626-功能安全
ISO 26262描述了功能安全评估过程的文件,以帮助开发安全相关电气和/或电子(E/E)系统。该框架旨在供制造商用于将功能安全概念集成到公司特定的开发框架中。一些要求具有明确的技术重点,以将功能安全实施到产品中;其他要求涉及开发过程本身,因此可以视为过程要求证明组织在功能安全方面的能力。
ISO 26262解决了由电气和电子故障引起的已识别的不合理安全风险。该框架旨在应用于安全相关系统,包括安装在生产道路车辆(不包括轻便摩托车)中的一个或多个E/E系统。ISO 26262旨在避免与电子系统相关的故障包括与软件编程、间歇性电子硬件故障和电磁干扰相关的故障,并减轻运行期间潜在设备故障的影响。除了解决故障条件外,还包括危险分析和风险评估规定、设计、验证和确认(V&V)要求和安全管理指南。
ISO 26262旨在确保系统能够充分缓解已识别危险的故障风险。所需的缓解量取决于潜在损失事件的严重程度、危险的操作暴露以及故障发生时系统的人类驾驶员可控性。这些因素结合在一起构成汽车安全完整性等级(ASIL)。ASIL确定应采用哪些技术和过程缓解措施,包括必须执行的指定设计和分析任务。
 分享
分享
图片新闻








最新活动更多
-
5月13日立即预约>>> 【线下会议】恩智浦创新技术峰会·深圳
-
精彩回顾立即查看>> 【在线直播】可视化神器!VisionSym 赋能汽车光学原型开发
-
精彩回顾立即查看>> 12月16-17日 AMD 嵌入式峰会
-
精彩回顾立即查看>> 恩智浦创新技术峰会
-
精彩回顾立即查看>> 【工程师系列】汽车电子技术在线大会
-
精彩回顾立即查看>> Works With 开发者大会深圳站
推荐专题

- 1 改写出行格局!充换电基建的五年蝶变
- 2 纯视觉遭调查 特斯拉自动驾驶遇生死考验
- 3 北京在全国首推“智驾险”,各车企智驾水平要“露底”?
- 4 VLA 与世界模型之争:谁才是辅助驾驶的正确方向?
- 5 卖芯片还是卖平台?地平线与黑芝麻智能悄然走出分水岭
- 6 2026 百人会论坛:地平线|推舱驾融合的“智能体芯片”
- 7 「武汉萝卜快跑」事件背后:有时停下是为了更快的奔跑
- 8 为啥有人认为自动驾驶纯视觉方案比激光雷达方案好?
- 9 中国自动驾驶Robotaxi围攻中东【附投票】:曹操出行、文远知行、小马智行、萝卜快跑四路诸侯,谁才是真正的“沙漠之狐”?
- 10 2026百人会论坛:卓驭科技|从智驾到物理AI,沈劭劼说这是生存判断不是战略判断



发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论